Nachdem nun die Bodenstation so gut wie fertig ist und mit FPV am Boden einige Erfahrungen mit den Scorpion gesammelt habe, ist es an der Zeit FPV dort zu betreiben, wo keine Balken sind - und man sich keinen Schwimmer schrotten kann ;-)
Um die Komponenten sauber einbauen zu können, wird ein neuer Twinstar bestellt. Diesen will ich nicht nur als FPV Flieger benutzen, sondern auch als Versuchsträger für den Ardupilot.
Selbiger muss sorgfältig - parallel zur Flugebene eingebaut werden, das geht besser, wenn die Rumpfhälften noch nicht zusammengeklebt sind.


Beim Bau des letzten Twinstar habe ich einige Erfahrungen gesammelt, die natürlich in den neuen Flieger mit einfließen werden.
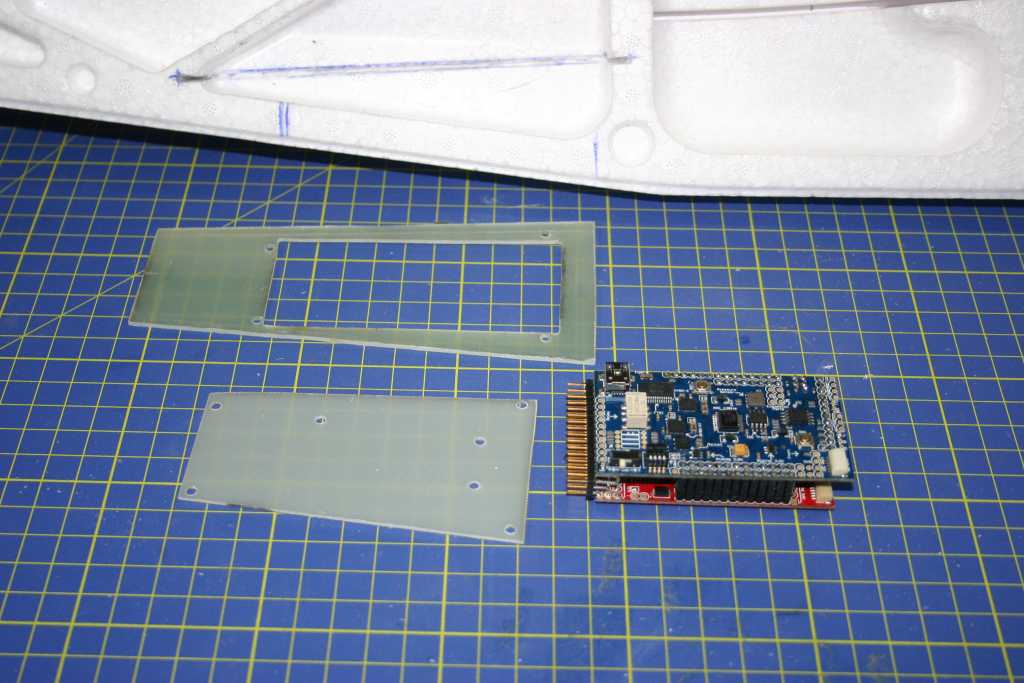
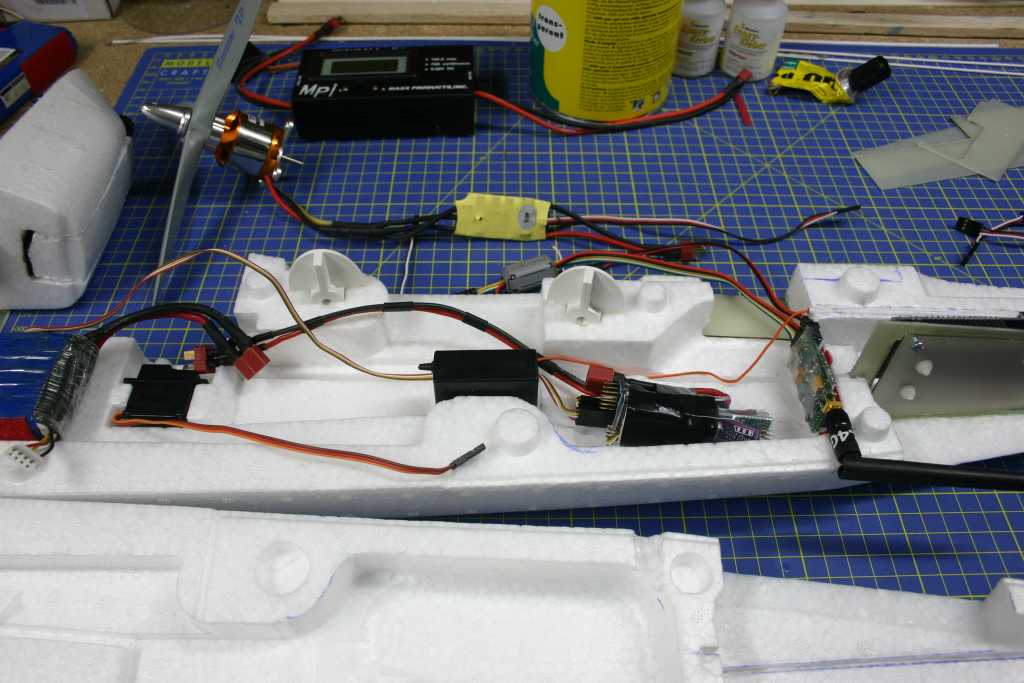
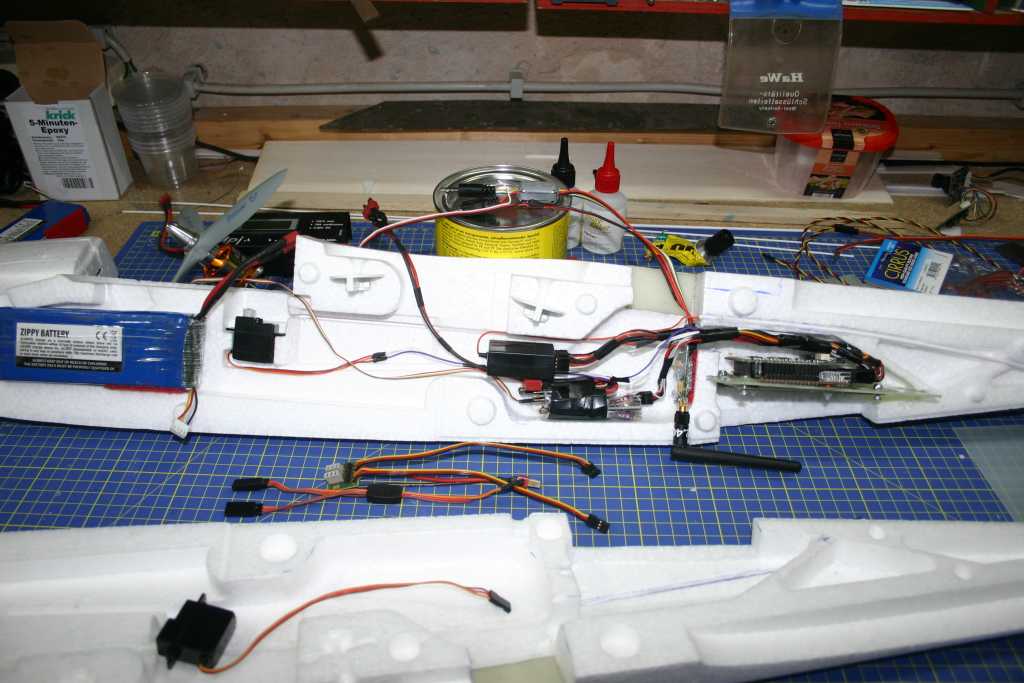
Auf den ersten beiden Bildern hier, der Baukasteninhalt bzw. die Komponenten die eingebaut werden sollen.
Die zusätzlichen Komponenten
sind:
- Ardupilot Mega mit IMU Shield /
Oilpan
- EagleTree OSD pro (On Screen Display)
- EagleTree Datenlogger
- MediaTek MT3329 GPS 10Hz
- 1/3-inch SONY CCD Video Camera (PAL 420 TVl)
- SMD Mikrofonverstärker mit Rauschsperre und Limiter Bausatz von
ELV
- 2,4 GHz 10mW Audio/Video Sender
- 35 MHz Fernsteueranlage
Zuerst will ich die Flügel bauen. Die Flügel werden kein FPV Equipment enthalten. Also ganz konventionelle Bauweise.
Zunächst werden die Ränder an den Motorgondeln mit einem scharfen Schnitzmesser abgeschnitten.


Als nächstes sollen die Motoren montiert werden. Normalerweise kommt der Twinstar mit 400er Permax Motoren. Diese Motoren sollen wieder durch bürstenlose Motoren ersetzt werden. Diese sind einfach wartungsfreundlicher und haben auch einen höheren Wirkungsgrad sowie eine höhere Leistungsabgabe.
Die Motorhalter müssen zur Aufnahme der brushless Motoren modifiziert werden weil diese im Durchmesser größer sind.
Weil es sich um Außenläufer handelt, dürfen sie am Motorhalter nirgends aufliegen, da sie ansonsten schleifen würden.
Dazu werden die Montagelöcher der Stirnplatte der Motorhalter verlängert.


So sieht das mit montiertem Motor aus.
Und hier sind beide Motoren fertig montiert.

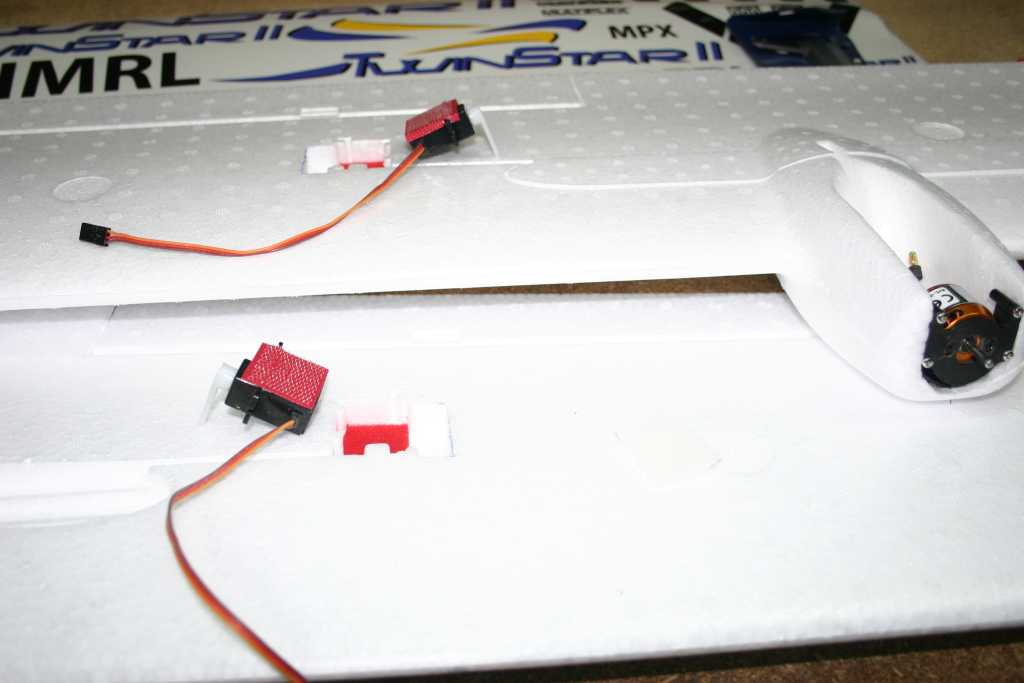
Die Querruderservos werden wieder mit Klett in den Tragflächen befestigt. Diese Montagemethode hat sich bisher bewährt.
Damit das Ruderhorn frei laufen kann, muss der Servoschacht in der Tragfläche noch ein wenig vergrößert werden.
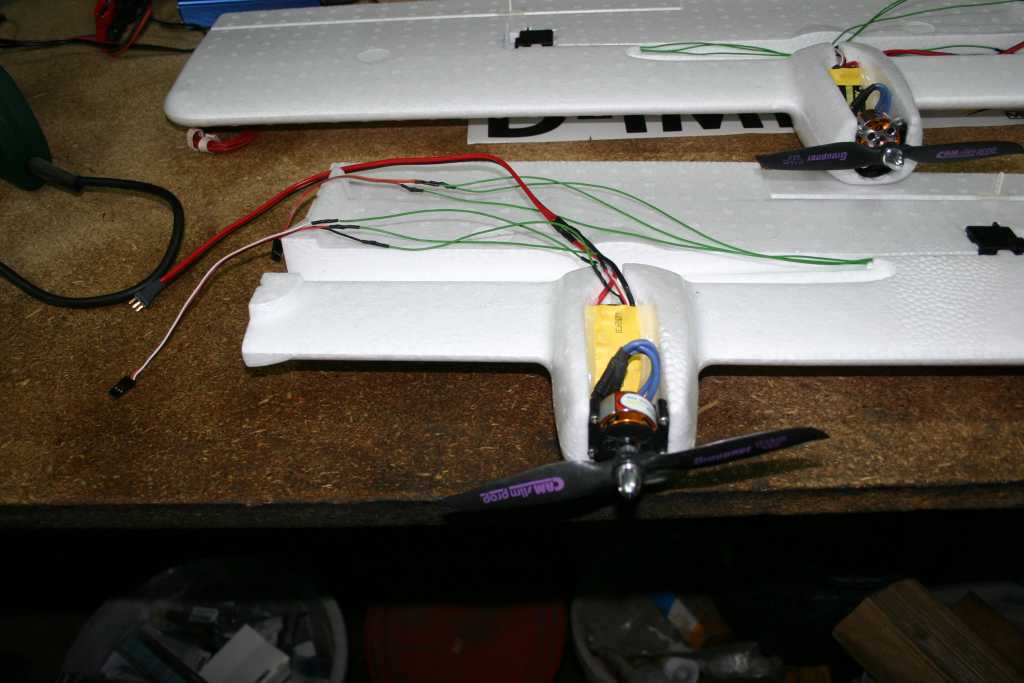
Anschließend werden die Motoren und die Motorregler montiert.
Die Regler werden in die Motorgondel mit Heißkleber eingeklebt. Die Kühlfläche des Reglers natürlich nach außen, so wird der Regler vom Luftstrom der Luftschraube gekühlt.
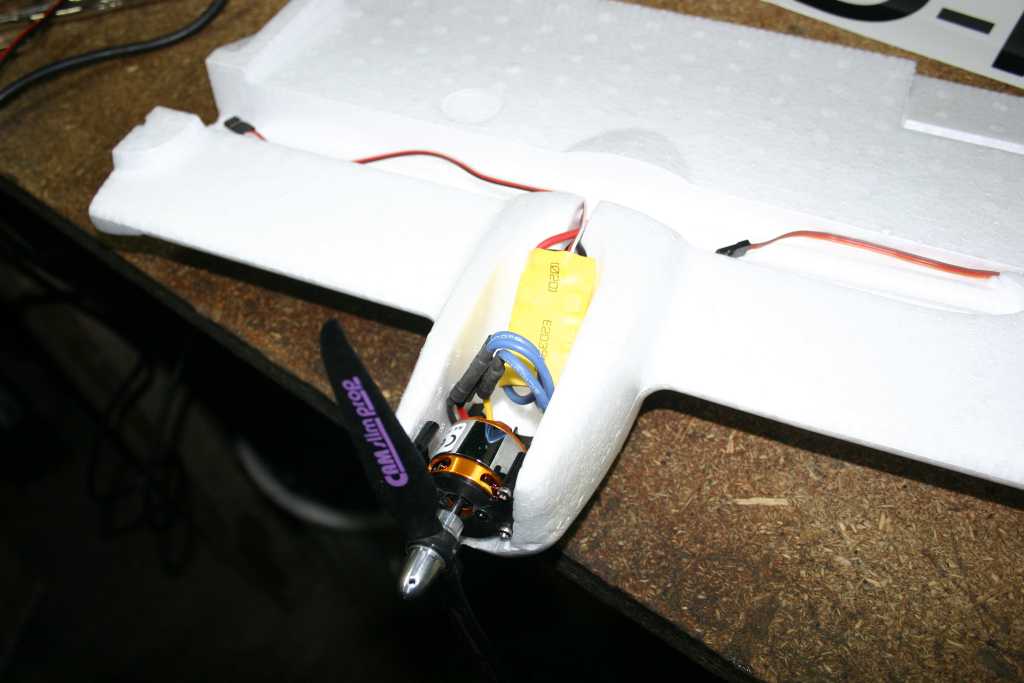

Es erfolgt ein Probelauf des Motors um die Drehrichtung zu testen.
Läuft der Motor falsch herum, müssen zwei der 3 Zuleitungen vertauscht werden.
Beim Probelauf stellt sich eine Unwucht an einem der mitgelieferten Motoren heraus. Das offene Gehäuse der Motorgondeln wirkt dabei als Resonanzraum und das Motorgeräusch wird dabei bei bestimmten Drehzahlen unerträglich.
Weil ich mit eingebautem Mikrofon fliegen will, ist das untragbar, der Motor wird durch einen anderen ausgetauscht.
Die Erkenntnis, dass es sich um eine Unwucht des Motors handelt, hatte ich durch mehrere Versuche mit veränderter Motormontage gewonnen. Die Stirnplatte für diesen Motor ist dabei leider "verbraucht" worden. Ich verwende für diesen Motor also eines der Montagekreuze.
Nun geht es daran, die Kabel zu berlängern.
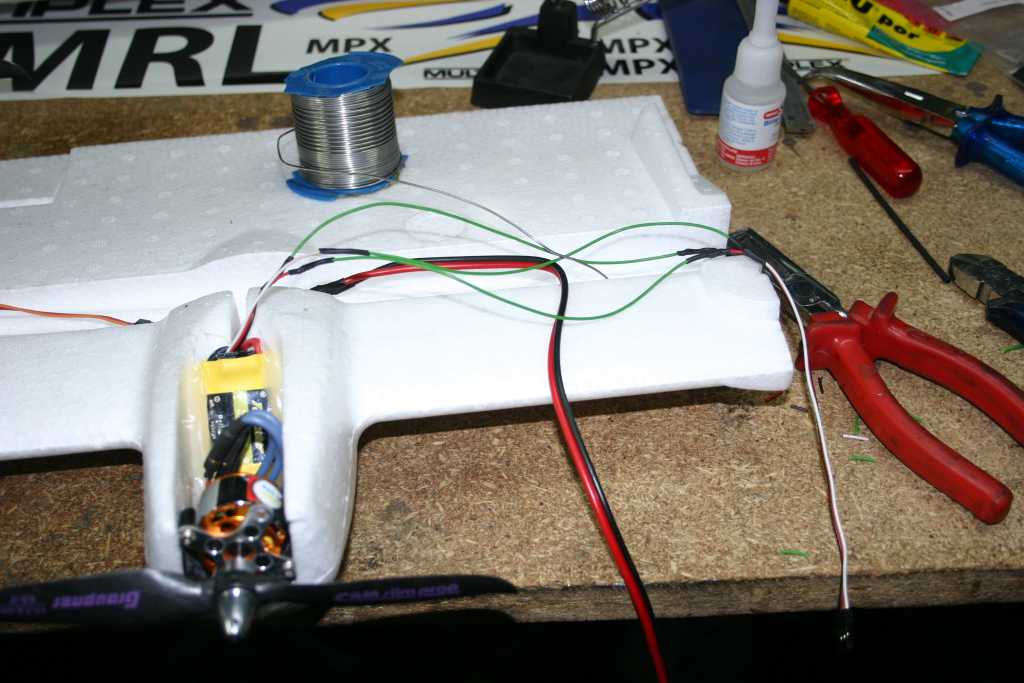
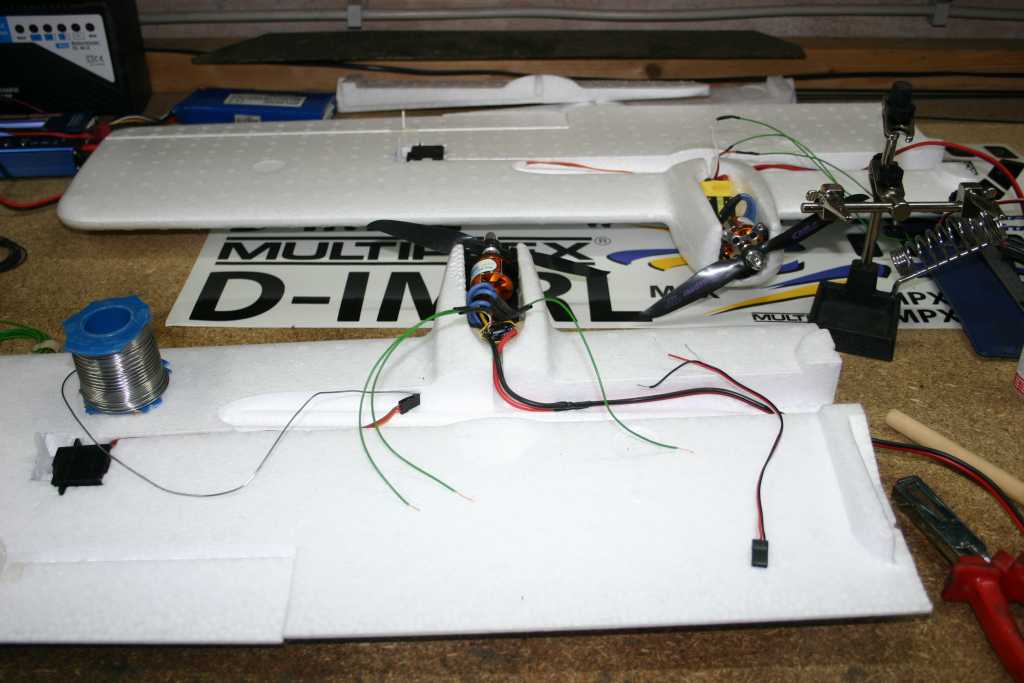
Es müssen die beiden Servokabel - ein mal Querruderservo und einmal für den Motorregler - sowie das Stromversorgungskabel für den Motorregler verlängert werden.
Ich verwende hierzu keine Servoverlängerungskabel sondern verlängere die Leitungen selbst. Das hat den Vorteil, dass ich die Kabellängen so bemessen kann, dass möglichst wenig Kabelsalat entsteht.
Hier sind nun alle Leitungen verlängert.
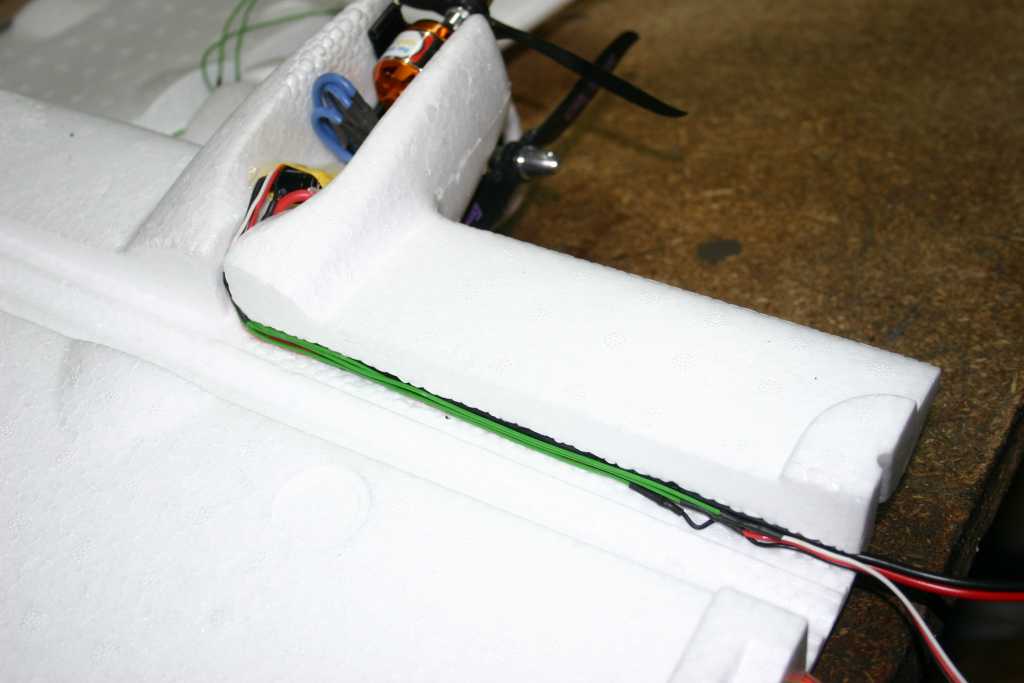
Die Leitungen werden nun sauber in der Aussparung der Tragfläche verlegt. Wo die Aussparung nicht tief genug ist, wird sie mit dem Lötkolben passend gemacht.
Die Leitungen werden dann mit einigen Tropfen Sekundenkleber fixiert.
Das gleiche gilt für die Leitung zum Querruderservo.


Anschließend werden die Aussparungen in den Tragflächen mit den mitgelieferten Formteilen verschlossen.
Für die Verklebung verwende ich Uhu Por. Dieser Klebstoff hat die Eigenschaft, nach der Aushärtung nicht hart und spröde zu werden wie Sekundenkleber, sondern elastisch zu bleiben.
Na ja, hier kann man nur schwer etwas erkennen. Aber der Vollständigkeit halber: Die Querruder können leicht abreißen. Die Scharniere bestehen ja nur aus dünnem Material.
Ich verstärke die Scharniere auf der ganzen Breite mit transparentem Klebeband.

Nun fehlt nur noch die Anlenkung der Querruder.
Die Ruderhörner werden eingeklebt - wieder mit Uhu Por - und angeschlossen.
Die Verschraubung wird mit Sekundenkleber gesichert.
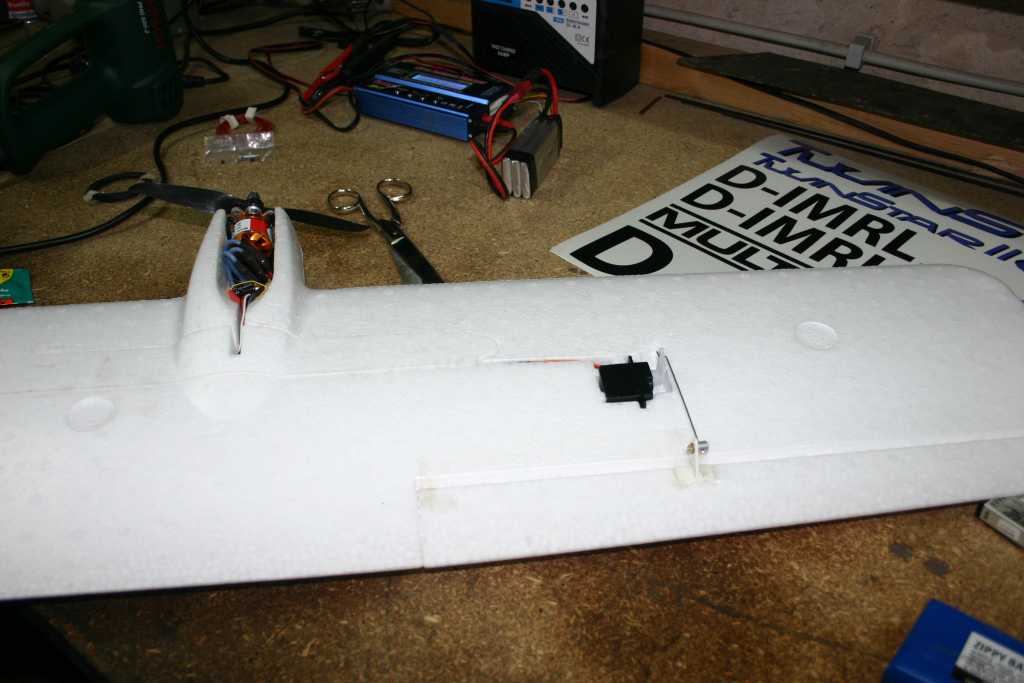
Auf diesem Bild sieht man die beiden Rumpfhälften mit eingelegtem Akku (3S 1P 40C 4000mAh Lipo) und den Servos für Höhen- und Seitenruder.
Der Akku kann als Balanciermasse verwendet werden um den Schwerpunkt korrekt einzustellen. Die Pan / Tilt Vorrichtung im Canopy lässt dem Akku die erforderliche Bewegungsfreiheit nach hinten um das Mehrgewicht im Frontbereich durch die Pan/Tilt Mechanik und die Kamera auszugleichen.


Nun werden die Bowdenzughüllen für das Höhen- und Seitenruder eingeklebt.
Die Bowdenzughüllen geben dem Rumpf zusätzliche Stabilität.
Hier sieht man die eingelassenen "Muttern" für die Tragflächenbefestigung.

Als Kamera will ich zunächst einmal die Fatshark HD Kamera nutzen. Sie zeichnet auf eine SDHC Karte auf und liefert ein PAL Video mit Ton.
Weil ich momentan noch keinen Headtracker und auch noch keine Fernsteuerung mit genügend Kanälen für den Flieger (4 Kanäle) + OSD (2 Kanäle) + Pan/Tilt (2 Kanäle) habe, baue ich die Kamera erst mal starr in den Flieger ein.
Ich schneide dazu das Originale Canopy so zurecht, dass die Kamera darin Platz findet.

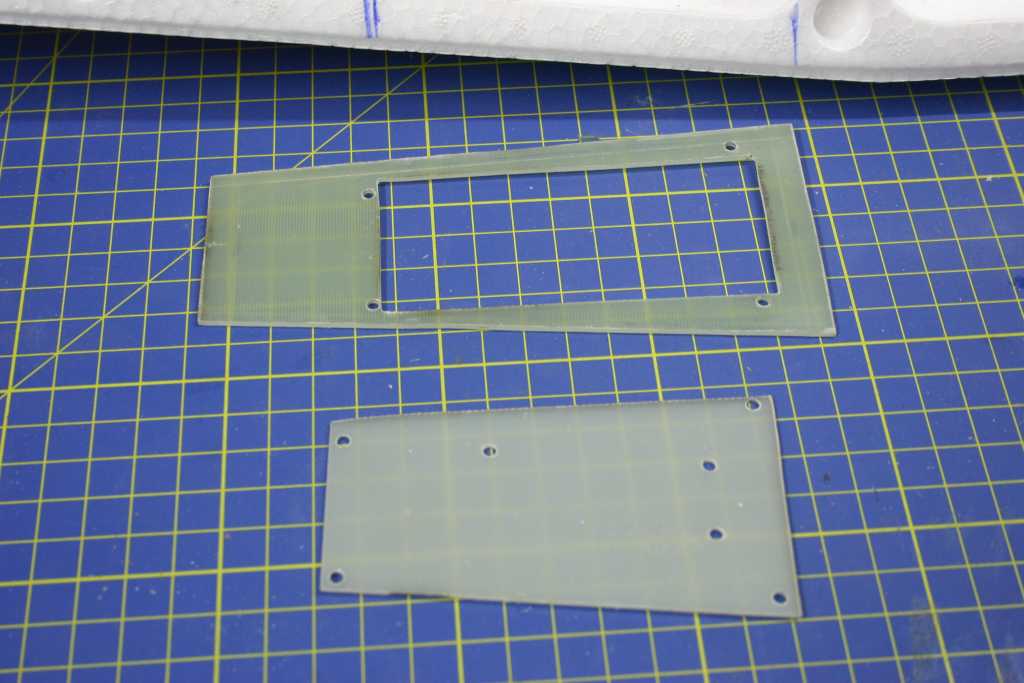
Als Autopilot soll nicht der kleine ArduPilot verwendet werden, sondern der ArduPilot Mega (APM) mit Oilpan IMU Shield.
Damit der APM sicher im Rumpf befestigt werden kann und trotzdem relativ einfach zu entnehmen ist, wird ein Einbaurahmen und eine Trägerplatte aus GFK geschnitten und gebohrt.
Der APM wird mit 3 Kunststoffschrauben auf der Trägerplatte befestigt. Das ganze soll dann durch eine Öffnung unten im Rumpf unter den Einbaurahmen gehoben werden können, wo es dann fest geschraubt werden soll.
Dazu werden Schlitze für die Aufnahme des Einbaurahmens in den Rumpf geschnitten.
Montiert wird das ganze in eine der Kammern im Rumpfinnern.
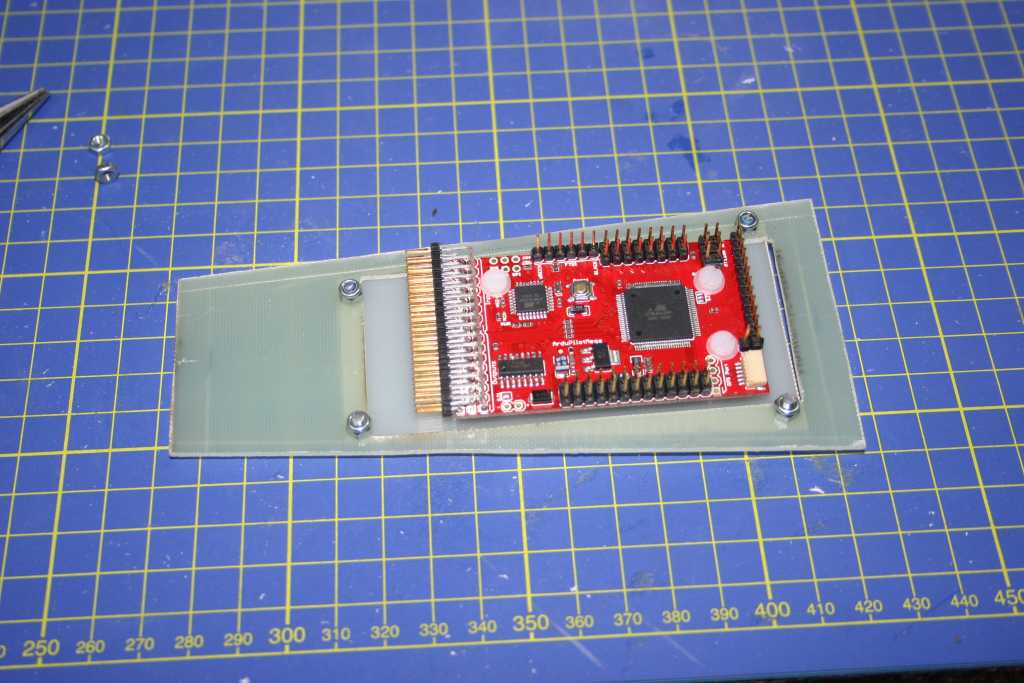
Das Oilpan IMU Shield wird huckepack auf den APM gesteckt.
Damit das überhaupt im zusammengeklebten Rumpf montier- und demontierbar wird, müssen auf dem Einbaurahmen Muttern eingeharzt werden.
Um einem Eigenleben der Schrauben bei Vibrationen vorzubeugen verwende ich selbstsichernde Muttern.
Das zusätzliche Gewicht durch den Autopiloten beträgt 69 Gramm.


Jetzt werden die Schnitte zur Montage des Einbaurahmens in den Rumpfhälften angezeichnet.
Durch den Einbau des APM so weit hinten im Rumpf halte ich den zu erwartenden Kabelverhau von den Servos fern. Gleichzeitig ist dies ein gutes funktionales Gegengewicht für die Kamera im Canopy und für einen evtl. noch größeren Akku.
Paßprobe mit dem Einbaurahmen.
Die Beladeöffnung muss noch geschnitten werden..

Die Modifikationen am Rumpf müssen an der anderen Rumpfhälfte ebenfalls durchgeführt werden.
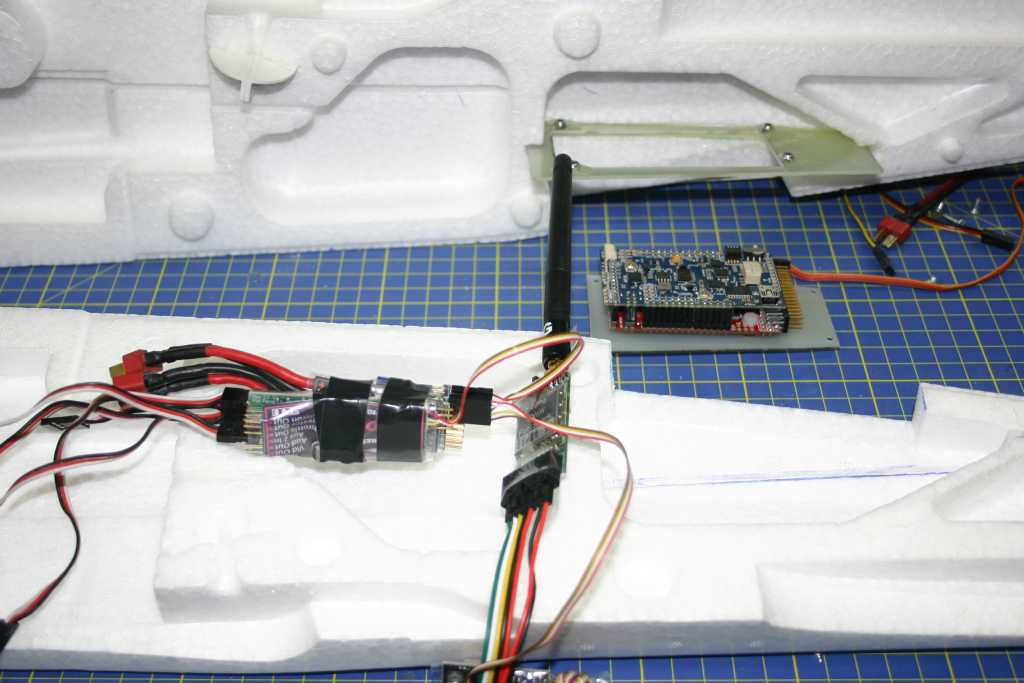
Nach einer Probe durch zusammenstecken der Rumpfhälften wird der Einbaurahmen in eine der Rumpfhälften eingeklebt.
Sender und OSD mit Stromsensor will ich in den Hohlraum davor einbauen.
Sender mit Antenne senkrecht nach unten. Sie wird bei der Landung im Gelenk nach hinten abknicken.
Jede Menge Laderaum wird gebraucht. Der Sender und das OSD muss auch noch untergebracht werden.
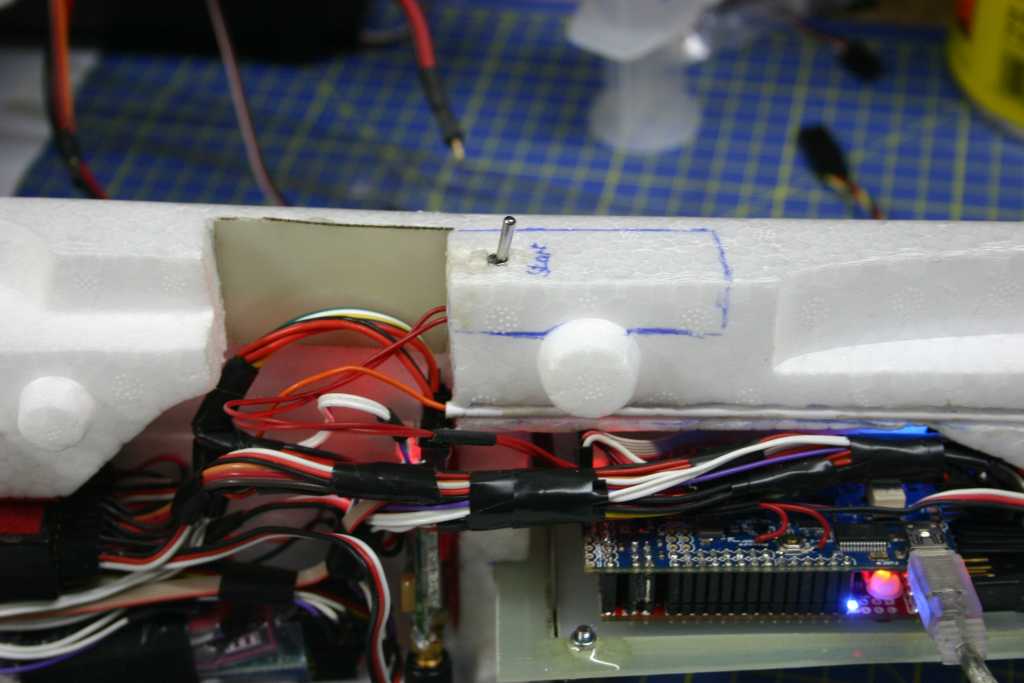
Diese beiden will ich in den Hohlraum vor dem APM unterbringen. Dazu wird der Rumpf weiter aufgeschnitten. Gleichzeitig entsteht noch eine Kabeldurchführung für den "Kabelbaum" zum APM. Hier müssen immerhin 9 !!! Servokabel durch.
Je 4 Leitungen für Gas, Höhe, Seite und Quer Eingang und Ausgang sowie eine Leitung für die Modeumschaltung des Autopiloten.


Damit das kein Gefummel gibt, wird der Laderaum hinter der Tragfläche auch von oben zugänglich gemacht. So kann man bequem den Videosender von oben durchstecken.
An die Trennwand zum "APM Raum" habe ich Klettband angeklebt. Damit wird der Sender im Rumpf fixiert.
Die Beladeöffnung nach oben verstärke ich mit GFK Platten. Wenn der Rumpf zusammen geklebt ist, kommen noch zwei Platten zur Verstärkung an die Stirnseiten der Beladeöffnung.
Die RC Antenne wird beim Twinstar standardmäßig durch ein Rohr im Rumpfboden nach hinten geführt.
Das hab' ich mir nun durch die AV-Antenne und den APM Laderaum verbaut.
Um die RC-Antenne trotzdem sauber nach hinten aus dem Rumpf zu führen lege ich stattdessen ein Leerrohr oberhalb des APM quer durch den Rumpf nach hinten und treffe dann später die dafür vorgesehene Rille im Rumpf. So tritt die RC Antenne wieder am gewohnten Ende aus dem Rumpf und ich kann dann für große Reichweiten problemlos auf eine 4m Antenne umbauen.

Jetzt beginnt der Anschluss der Elektronikkomponenten.
Ich will mich systematisch von den Quellen zu den Verbrauchern durcharbeiten. Zuerst das Stromkabel vom Akku zum ET-Stromsensor und Datenlogger.
Eine weitere Quelle ist - signaltechnisch gesehen - der RC-Empfänger.
Ich brauche 5 passende Leitungen zum APM für Gas, Höhen-, Seiten- und Querruder sowie für die Modeumschaltung.
Die passenden Längen habe ich natürlich nicht vorrätig. Die Crimpzange und das Zubehör dazu habe ich nicht hier und so verlängere ich eben ein paar vorhandene Servokabel.


Eine echte Syssiphusarbeit die enorm aufhält. 5 Kabel a 3 Adern aufschneiden, 15 Verlängerungen zurechtschneiden, insgesamt 60 Kabelenden abisolieren, 30 Schrumpfschläuchlein zurechtschneiden und aufstecken, 30 Lötverbindungen machen und zuschrumpfen.
Crimpen wäre schneller gegangen.
Diese Kabel werden mit Isoband gebündelt und angeschlossen.
Nun ist die Verbindung vom APM zum OSD an der Reihe. Hier müssen Gas, Höhenruder und Querruder angeschlossen werden. Das Seitenruder wird nicht vom OSD kontrolliert, dieses wird direkt am APM angeschlossen.
Die notwendige Länge der Kabel wird ausgemessen und entsprechend hergestellt.

Diese Kabel werden ebenfalls angeschlossen und verlegt.
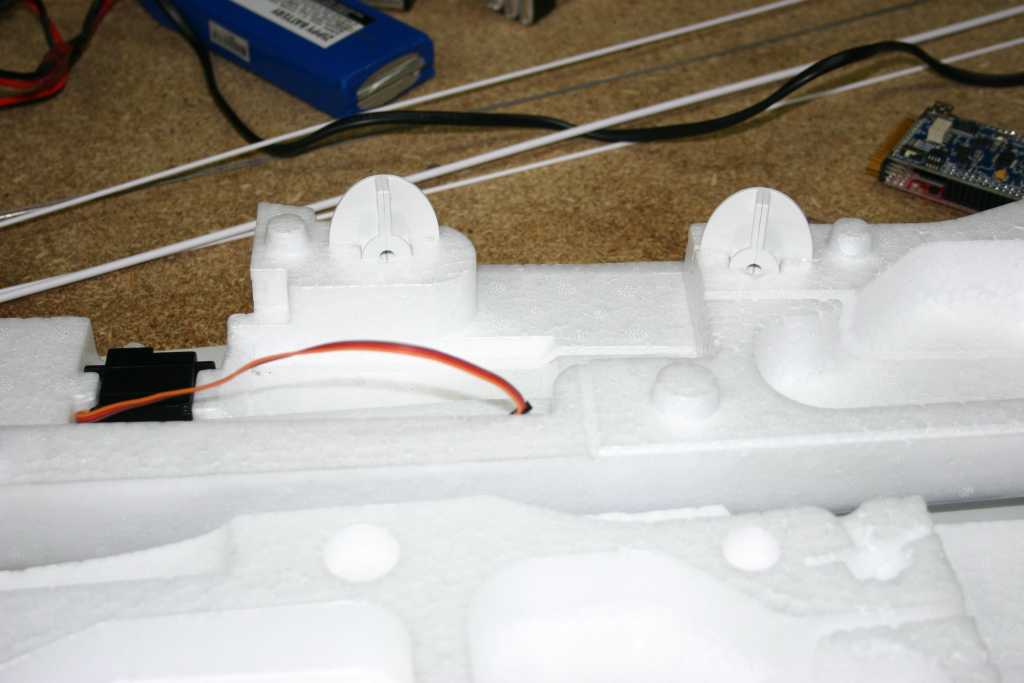
Das Seitenruderservo wird montiert.
Im alten Twinstar haben diese Servos "Zahnausfall" und sollten bald ersetzt werden bzw. ein neues Getriebe erhalten. Es ist also durchaus möglich, dass so etwas mit diesen Servos auch passieren kann. Daher befestige ich dieses Servo ebenfalls nur mit selbstklebendem Klettband. Aber das ist dann doch etwas zu wackelig weil die Ausschachtung für das Servo zu breit ist.
Das ist aber mit einem Stückchen 2mm starkem Depron schnell behoben.
Und wo ich schon mal am Restehaufen bin, finde ich auch schnell noch ein paar Stückchen, mit denen ich die Schlitze im Rumpf, in die die Bwodenzugrohre für die Höhen- und Seitenruderanlenkung montiert wurden, verschließen kann.
Das bringt sicher etwas zusätzliche Stabilität.
Den Empfänger befestige ich nun ebenfalls mit selbstklebendem Klettband im Rumpf.
Damit das Klettband auch wirklich hält, verstärke ich die Klebefreudigkeit vorher noch mit etwas Uhu Por den ich gut antrocknen lasse.


Nun will ich das EagleTree GPS Modul montieren.
Um den Störeinfluss des Empfängers und der Controllerboards der ArduPilot so gering wie möglich zu halten, habe ich mich dafür entschieden, das GPS Modul in die Nase einzubauen.
Ich verlege das Kabel im Rumpf so, dass man immer noch einen Akku einschieben kann ohne dass dabei das Kabel im Weg ist und schneide eine Aussparung in die Nase.
Ich nutze dazu teilweise die Belüftungsöffnung. Inwieweit das nachteilig sein wird, weiß ich noch nicht. Im alten Twinstar wurde der Bereich ja vollständig vom Akku ausgefüllt und es kam so auch kein nennenswerter Kühlluftstrom im Rumpfinneren zustande.


Jetzt fehlt noch die Kamera. Natürlich ist das mitgelieferte Kabel zum Anschluss der Kamera an den Sender zu kurz - und außerdem muss ja noch das OSD dazwischengeschaltet werden.
Also.... schnipp.... Kabel abschneiden und das Videosignal sowie VCC und Masse über das OSD schleifen.
Audio verbinde ich direkt zum Sender, das Audio über das OSD zu führen hat mir in der Vergangenheit keinen Mehrwert gebracht.
Jetzt ist hier elektrisch betrachtet soweit fast alles fertig.
Nur noch der zweite Kontrollkanal für das OSD fehlt. Da muss ich aber erst einmal die Betriebsanleitung meiner Funke (Multiplex Cockpit sx) zu Rate ziehen. Der noch offene Kanal 5 ist nämlich aktuell auch mit dem Querruder belegt. Fein wäre es, wenn ich da noch einen anderen Kanal drauf legen könnte. Dann habe ich die Fernsteuerung ausgereizt.
Das bedeutet, wenn ich noch eine Pan/Tilt Funktion für die Kamera einbauen möchte, muss eine bessere Funke her.


Der Rumpf mit allen Anbauteilen, also mit 3S 5000mAh Akku und auch das Canopy mit der Kamera sowie das Höhen und das Seitenleitwerk kommt so auf 1055 g.
Dummerweise - fällt mir jetzt gerade ein - habe ich den Rumpf des normalen Twinstar nicht zum Vergleich gewogen.
Wird nachgeholt.
Dann habe ich die noch nicht eingebauten
Komponenten ordnungsgemäß verbaut. Einen schönen Ferritring
vor das MTK-GPS für den APM gesetzt und alles schön in die Nase
eingebaut.
Das Servo wurde ebenso eingebaut wie das in der anderen Rumpfhälfte.
Also ein 2mm Depronstück eingeklebt um die Aussparung saugend passend
zu machen, Klett rein und Servo drauf.


Es ist nun alles soweit fertig eingebaut
- inklusive USB Kabel für das OSD, so dass ich es nur rausziehen
muss um Daten vom Logger runterzuladen oder ein neues Firmwareupdate aufzuspielen.
Bevor ich nun die Rumpfhälften zusammenklebe, will ich die Elektronik
nun testen.
OSD bootet und wartet brav auf einen GPS fix.
In der Beschreibung zur aktuellen Software ist zu lesen, dass man nach dem power up des APM noch einmal resetten soll, um sicher zu gehen, dass dem MTK-GPS der korrekte Initialisierungsstring gesendet wurde. Es ist also notwendig, einen Reset Schalter außen am Flieger anzubringen.

Airspeed will ich messen. Es ist
schon von Vorteil, wenn der Autopilot mit 12 m/s fliegen möchte und
bei 12m/s Rückenwind nach Airspeed fliegt - nicht nach speed over
ground.
Lange überlegt, wo die Pitot Röhrchen am besten eingebaut werden
sollen.
Gerne in die Nase. Da gehören sie hin. Ich habe aber schon so viel
Zeug hinten eingebaut, dass ich fürchte, ich muss mit dem Akku ganz
nach vorne rutschen. Da stört dann der Sensor. Und den in die stabile
Nase einschmelzen will ich nicht.
In die Flügelenden ? Schläuche zu kurz und zu viel Anschlussaufwand
beim Zusammenbau vor dem Fliegen.
Also an das Seitenleitwerk. Am besten wäre ganz oben. Aber dazu sind
auch die Schläuche zu kurz. Aber man kann sie ja weiter unten einbauen.
Das macht wohl nix, weil der Twinstar ja die Propeller an den Tragflächen
hat. Also mache ich 2 Löcher an der passenden Stelle für die
Schläuche und führe sie durch.
Zum Softwareupdate und zur Konfiguration von Regelparametern und der Fernsteuerung, zum Einstellen der Betriebsmodi, zum Hochladen von waypoints und zum download der logfiles ist eine USB Verbindung zum Rechner notwendig. Das geschieht wohl sehr häufig und ich habe keine Lust, dazu jedes Mal das Board auszubauen - obwohl das möglich ist. Es kommt also ein USB Konnektor in den Rumpf.
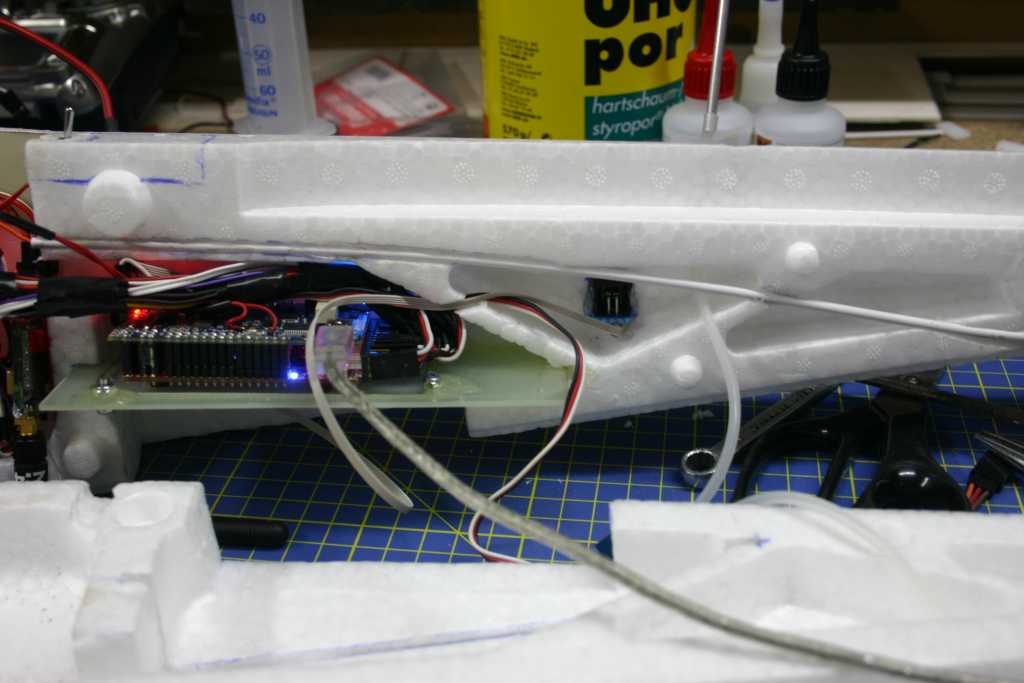
Nun wird auch der Airspeed Sensor
eingeklebt und so angeschlossen, dass auch dessen Kabel beim Ausbau des
APM Boards nicht stört.
Eine ganz schöne Menge an Silizium und Kupfer ist hier nun verbaut.
Bin auf das Abfluggewicht gespannt.
Hier ein Bild vom Rumpf mit der eingeklebten USB Buchse.


Das Loch im Rumpfboden muss noch verschlossen werden. Ich verwende die zusammengeklebten Ausschnitte und mach' noch ein Schnürchen dran damit man's einfacher öffnen kann.
Die Pitot Röhrchen werden am Seitenleitwerk befestigt. Ist mal noch nicht endgültig, daher auch der provisorische look.


Es fehlt noch der Abweiser vor der
AV Antenne. Ich schneide was aus dem Material was zu Anfang von den Motorgondeln
abgeschnitten werden musste zurecht und kleb's an.
Der Abweiser soll beim Landen die Längskräfte aufnehmen so dass
der SMA Stecker am Sender so wenig wie möglich belastet wird.
Die Ruder werden noch justiert -
Mittelstellung Servo = Mittelstellung Ruder - und der Schwerpunkt ausgewogen.
Mit dem 3s5000 mAh Akku ganz vorne in der Nase passt der Schwerpunkt schon
mal recht gut. Er ist nicht ganz 1cm zu weit hinten, das dürfte fliegbar
sein.
Das Abfluggewicht liegt bei 1678g. Auch das sollte fliegbar sein.
Die Servos reagieren
im stabilize Mode. Beim Rollen gehen die Querruder Servos deutlich dagegen.
Dazumischen des Seitenruders fuktioniert auch.
Beim Neigen bewegt sich das Höhenruder.
Schrittweise Inbetriebnahme
Der Flieger ist nun so weit fertig,
dass die Komponenten schrittweise in Betrieb genommen werden können.
Zuerst wird alles auf der Werkbank getestet. Es funktioniert soweit auch
alles auf Anhieb.
Test 1: 01.04.2011
Zum ersten Flugtest fahre ich nach der Arbeit beim Modellflugplatz vorbei und baue erst mal alles auf. Flieger zusammenbauen, Strom anschließen, auf GPS fix warten, Bodenstation aufbauen, Bodenstation einschalten und Recorder in den Aufnahmemodus schalten.
Am Boden erfolgt erst ein Reichweitentest mit eingeschobener Antenne und anschließend ein Ruder- und Gascheck.
Funktioniert alles, also Recorder
Aufnahme starten und onboard Kamera Aufnahme starten. Vollgas und Handstart.
Der Twinstar fliegt stark kopflastig etwa 30 s und reagiert dann nicht
mehr. Bohrt sich aus etwa 5m Höhe senkrecht in den Boden.
Ursache:
Die Stromversorgung an Bord reichte nicht aus, alle Komponenten zu versorgen,
wenn die Servos alle gleichzeitig in Betrieb sind. Alle Komponenten, die
einen Mikroprozessor an Bord haben booten neu. Während des Bootvorgangs
war keine Steuerung möglich, erfolgte kein Videomitschnitt und keine
Telemetrieübertragung.
Abhilfe:
Es wird ein seperates BEC eingebaut. Das BEC leistet 3A und speist alle
Komponenten im Rumpf. Das sind:
- Seitenruder Servo
- Höhenruder Servo
- Kamera Fastshark HD
- 2,4 GHz 10mW Fatshark A/V Sender
- EagleTree OSD pro
- EagleTree Datalogger V4
- Eagletree GPS
- ArduPilot Mega
- IMU Oilpan Shield
- MTK GPS für ArduPilot
- Airspeed Sensor
Diese Komponenten haben einen Ruhestrom von 0,9 A
Die BEC in den Motorreglern in den Motorgondeln werden vom Stromkreis im Rumpf abgetrennt und versorgen ihrerseits lediglich das jeweils in der Fläche eingebaute Querruderservo.
Ein Distanzstück für den Akku wird aus Styropor geschnitten um den Schwerpunkt weiter nach hinten zu verlegen.
Risse aufgrund des Absturzes werden mit Uhu Por im Kontaktklebeverfahren geklebt, neuralgische Punkte werden mit Strappingtape verstärkt.
Test 2: 04.04.2011
Test des Schwerpunktes, Einfliegen der Trimmung.
Der Twinstar wird vorbereitet, die
Bodenstation wird nicht aufgebaut.
Nach einem elektrischen Stresstest erfolgt der Handstart.
Der Twinstar fliegt schon etwas besser, nicht mehr ganz so wie eine schwangere
Ente.
Hier gibt es das Video dazu:
Ergebnis:
Der Schwerpunkt ist doch noch ein klein wenig zu weit hinten. Das Höhenruder
schlägt im Stabilisierungsmodus in die falsche Richtung aus. Die
Motorkabel in den Gondeln sollten fest geklebt werden. bei manchen Flugmanövern
kommt wohl ein Kabel an den Motor, der daraufhin stockt.
Test 3: 06.04.2011
Prüfen und ggf einstellen der Regelparameter für den stabilize mode und für den fly by wire mode des ArduPilot.
Dieses Mal wird die Bodenstation
aufgebaut. Es soll hier eine Art Vortest für den irgendwann folgenden
FPV Test erfolgen.
Festgestellt. dass das Antennenkabel der Patchantenne einen Wackelkontakt
hat. Für diesen Test nicht wichtig, die Omni Antenne wird eben reichen
müssen.
Ich mache noch ein paar Bilder - soll man nicht versäumen, so lange das Modell noch heile ist bzw. noch nicht weg geflogen ist.


Ja, das ist 'n Insider....
Für das Geschäft - und auch für mich privat hatte ich einen Quadcopter auf Basis des ArduPilot Mega gebaut. Ein Praktikant hat sich damit beschäftigt und ihn zum fliegen gebracht, altitude hold, GPS Position hold implementiert und kurz vor den Arbeiten für den Waypoint modus ist der Quadcopter weggeflogen.
Schade, denn am Wochenende darauf wollte ich zum Nürburgring fahren und dort Claus Ibsens GLP Speedmaster Veranstaltung aus der Luft dokumentieren.
Und hier noch ein Bild mit Bodenstation
und mit einem unserer Praktikanten, der interessehalber mit gekommen ist.
Alex wurde dann zum Filmen angeheuert
Der Twinstar wird vorbereitet. Es
wird nach dem Einschalten ein GPS fix abgewartet und dann wird der ArduPilot
sicherheitshalber noch einmal gebootet.
Es folgt ein Test am Boden, ob die Steuerflächen bei rollen und nicken
richtig reagieren.
Dann wird die Videoaufzeichnung in der Bodenstation und im Flieger gestartet
und es erfolgt ein Handstart.
Bei starkem und teils böigem Wind bringe ich den Twinstar auf eine sichere Höhe. Bei geschätzten 30m Flughöhe schalte ich in den stabilize mode um - bereit, schnell wieder zurück zu schalten und den Flieger abzufangen.

Ich lenke ihn aus der Normalfluglage um zu sehen, wie gut er sich stabilisiert. Dauert das zu lange, muss der P-Anteil des betreffenden Reglers erhöht werden. Gibt es Überschwinger, muss der P-Anteil verringert werden.
Es passt aber ganz gut.
Lediglich beim Rollen mit dem Querruder gibt es einen Punkt, an dem er nachdem vorher nicht viel passiert ist, ganz plötzlich abkippt.
Im fly by wire mode ist es ähnlich, nur dass er dann eben nicht die Nase nach unten nimmt sondern in eine größere Kurvenschräglage geht.
Ich habe viel Expo auf dem Querruder, ich führe das darauf zurück.
Also muss für den nächsten Test der Expo Anteil raus genommen werden und dafür der Ruderweg verringert werden.
Hier das Video:
Ergebnis:
Expo auf dem Querruder rausnehmen. Rudergestänge für geringeren
Ruderausschlag umhängen.
Verhalten danach noch einmal testen.
Test muss das Verhalten sowohl im manuellen- als auch im stabilisierten
Modus beinhalten.
Kabel an der Patchantenne reparieren.
Test 4: 10.04.2011
Prüfen und ggf einstellen der Regelparameter für den Return To Launch- oder Return To Home mode (RTL oder RTH) sowie weitere Flugtests im stabilize mode des ArduPilot.
Die Bodenstation wird wieder aufgebaut. Die Erfahrungen des letzten Test sollen verifiziert werden. Die reparierte Patchantenne soll ebenfalls getestet werden.
Bilder zu machen wurde dieses Mal leider versäumt. Ich habe daher ein paar Bilder aus den Videos extrahiert.


Nachdem die Bodenstation fertig aufgebaut und ausgerichtet war, wurde der Twinstar startklar gemacht und zunächst ein Reichweitentest der Videoverbindung gemacht.
Absolut unbefriedigend. Nach bereits 20m Entfernung wurde das Videobild schlecht und die Telemetrie wurde schon nicht mehr empfangen. Hierzu muss eine eigene Testreihe entwickelt werden, um dem Problem auf die Spur zu kommen und um es zu lösen. Mit den verwendeten Rundstrahlantennen sollte locker eine Video Reichweite von ca. 300m zu erzielen sein.
Anschließend wurde dann der Twinstar aus der Hand gestartet.


Der ArduPilot reagierte sofort deutlich hörbar mit einer höheren Gasstellung und leitete sofort eine Kurve in Richtung Startplatz ein.
Der RTH war so eingestellt, dass der APM bei Erreichen seiner Zielposition in 100m Höhe über Grund Kreise zieht.
Daher kam der Twinstar ständig steigend näher und bezog dann über unseren Köpfen brav seine "Warteposition".
Die Reglerparameter für die Gasstellung müssen noch angepasst werden. Die Motordrehzahl oszillierte zwischen 3/4 Gas und aus. Hier muss wohl zum einen die Reisegeschwindigkeit etwas hoch gesetzt werden, zum anderen der P-Anteil des PID Reglers verringert werden.
Die Warteschleifen waren auch nicht rund sondern wurden manchmal als 8 geflogen. Hier muss eventuell der Radius etwas vergrößert werden.

Dieser Versuch wurde noch einmal erfolgreich aus einer ähnlichen Distanz wiederholt. Beim dritten Versuch kam es zum Absturz.
Der Unterschied zwischen den beiden Versuchen war, dass beim letzten Versuch recht nah an einen Fernmeldeumsetzter herangeflogen wurde. Auch war die Flughöhe nicht sonderlich hoch. Der Flieger reagierte schon beim manuellen Flieger nicht mehr korrekt auf die Steuereingaben, so dass sofort auf RTH umgeschalten wurde. Die Reaktion darauf war zunächst korrekt, aber leider nicht dauerhaft. Vermutlich wurde das Fernsteuersignal nicht korrekt empfangen und somit auch der RTH mode wieder zeitweise deaktiviert.
Weil RTH offensichtlich grundsätzlich funktioniert, ist zu überlegen, ob bei den nächsten Versuchen RTH nicht als failsafe Einstellung konfiguriert werden sollte.
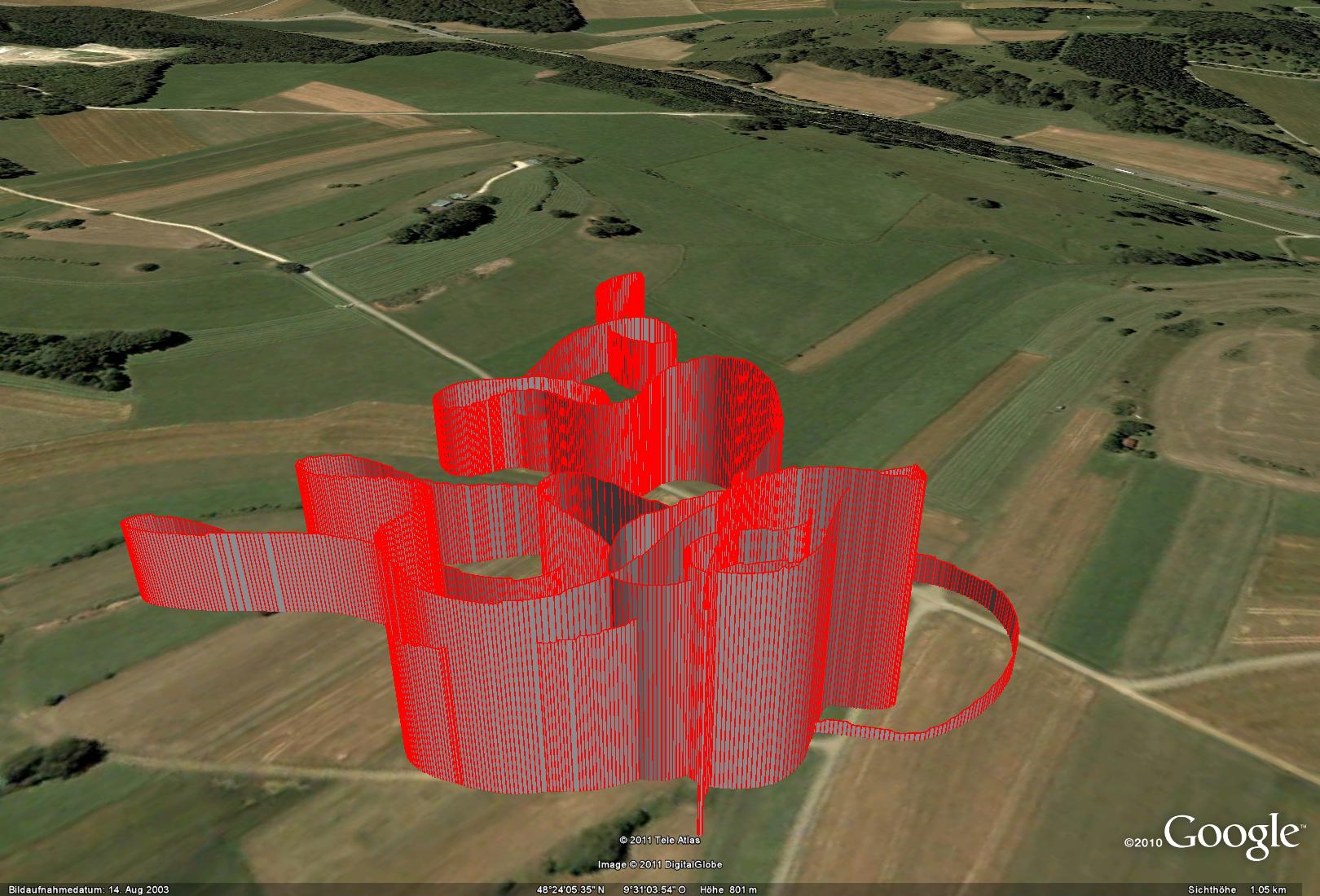
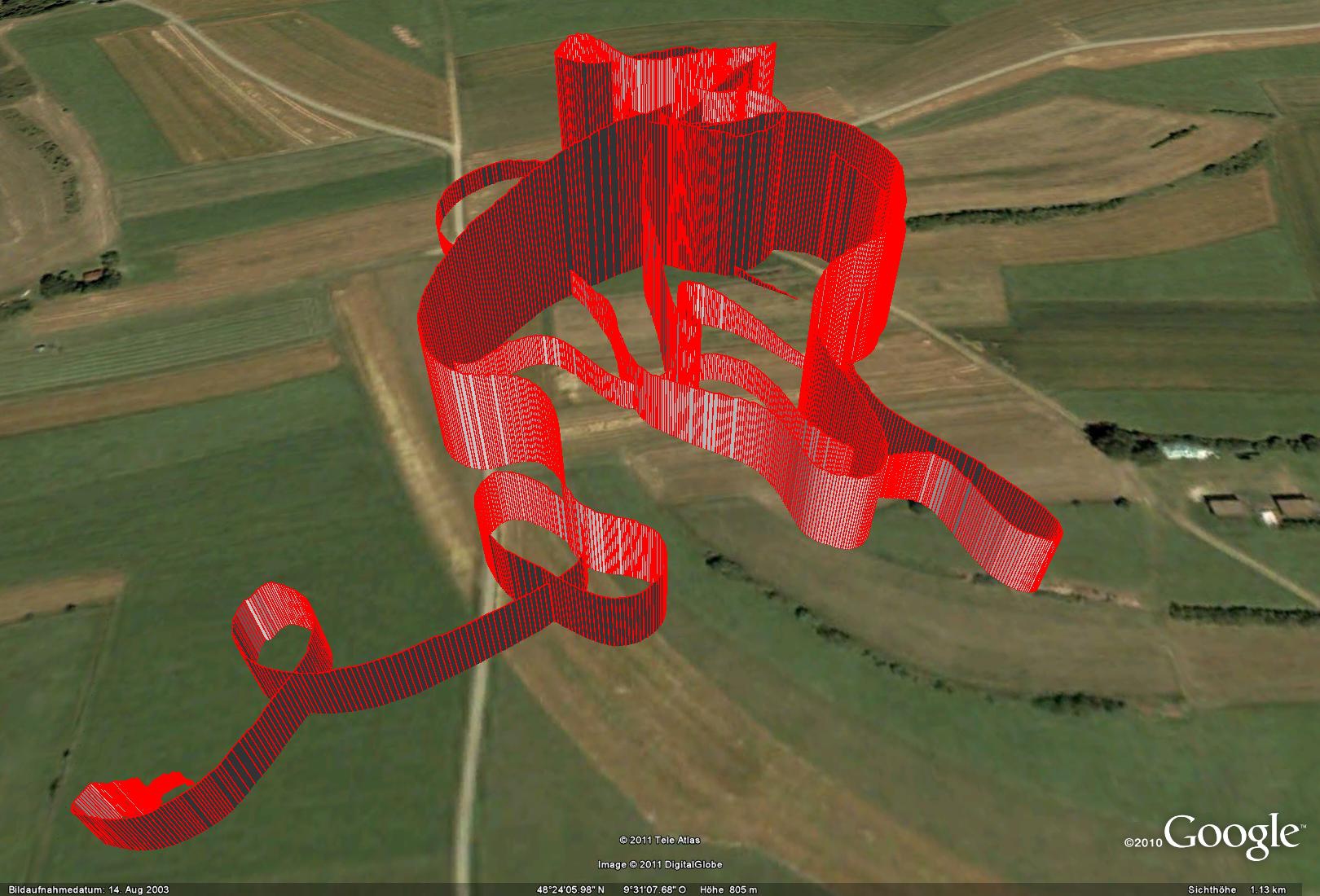
Ich habe mittlerweile die logfiles vom ET Datalogger runtergezogen und mit der EagleTree Software in kml files umgewandelt. Die folgenden Bilder zeigen den RTH-Testflug aus zwei verschiedenen Perspektiven. Die hoch geflogenen Kreise und Achten sind das automatisch geflogene loitering über der Home Position. Die auffällig scharfen 180 Grad Kurven im rechten Bild rechts unten, sind die Stellen, an denen ich auf RTH geschalten hatte.
Maximal geflogene Geschwindigkeit:
72 km/h
Maximale Flughöhe: 894m NN
Starthöhe: 795 m NN
Flugdauer: ca. 8min
Stromverbrauch: 798 mAh
5Wochen sind nun vergangen in denen ich am Quadcopter gearbeitet habe. Der ist mittlerweile auch kurz geflogen.
Der Gebutrstag meines Sohnes hat mich wieder zurück zu den Flächenfliegern gebracht - mein SOhn hat einen Graupner Elekrto Rookie QR zum Geburtstag bekommen der heute auch seinen Jungfernflug per Lehrer - Schüler Betrieb hatte.
Bei der Gelegenheit habe ich mich endlich dazu aufgerafft, nach dem Fehler im FPV Twinstar zu suchen. Es war nämlich mehr, als nur der Umsetzer der den Funk gestört hatte.
Beim Anschluss eines Akkus ging nur
noch das an den Datenlogger angeschlossene GPS Modul. Der Rest war tot.
Auf dem 5V Stromkreis war ein Widerstand von 0,3 Ohm zu messen. Ein Kurzschluss
?
Nach 1 Stunde Fehlersuche stand fest: Der Step down Spannungsregler, der
die Elektronik im Rumpf versorgte, ist kaputt.
Die Absturzursache war also wieder einmal Stromausfall (siehe 1. Flugtest).
Es wird ein neues UBEC eingebaut,
welches einen größeren Kühlkörper hat und einen höheren
Strom liefern kann.
Der Schwerpunkt muss noch neu ausgewogen werden und die Elektronik muss
einem Dauertest unterzogen werden.